ROS2 Workspace anlegen
- Im Homeverzeichnis des Linux Betriebssystems einen Ordner "ros2_ws" erstellen
- In "ros2_ws" den Ordner src erstellen
- dann in den Ordner ros2_ws (zurück) navigieren und hier ein Terminalfenster öffnen
- Folgendes eingeben
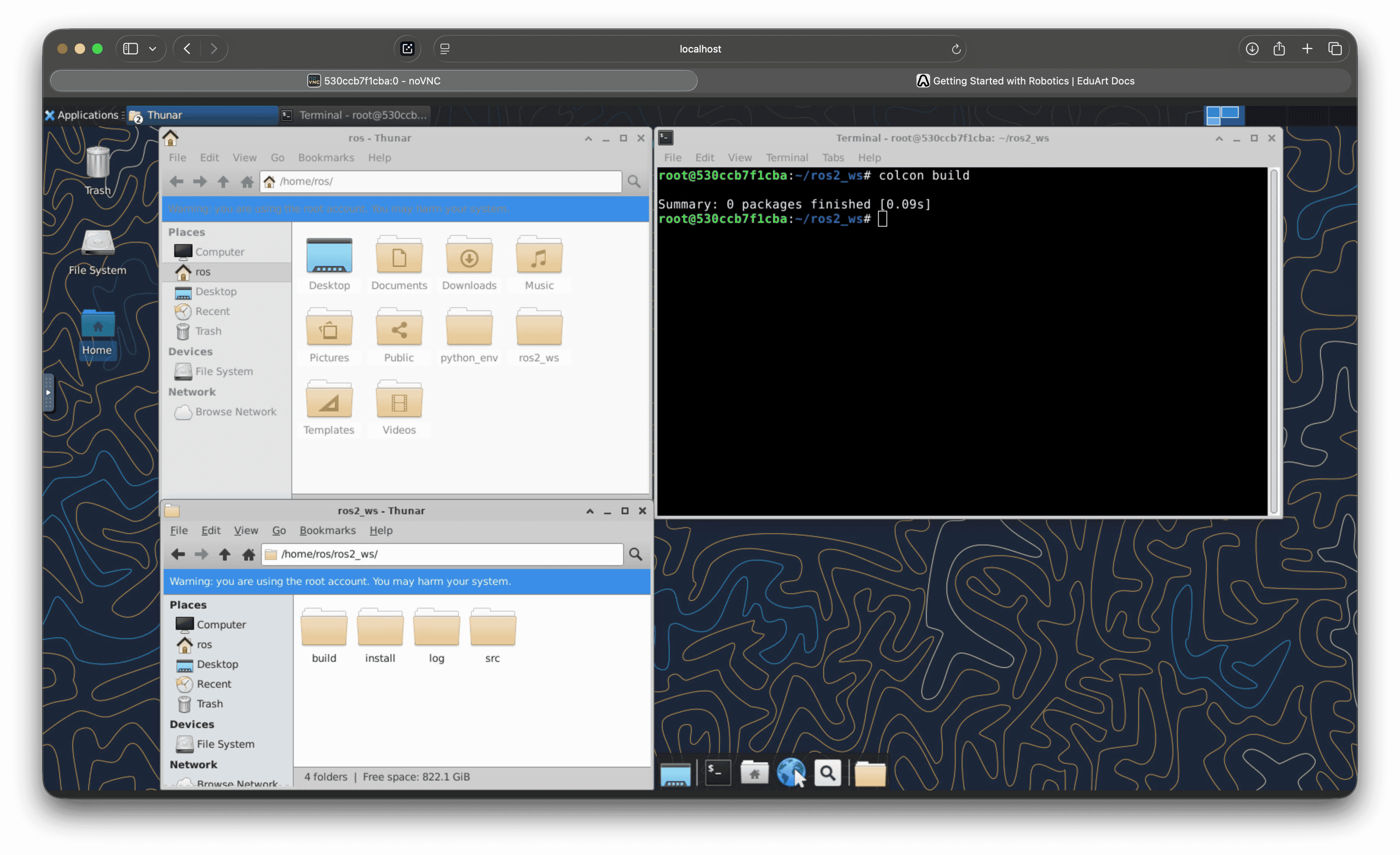
colcon build
- erstellt werden jetzt die Ordner Build, Install und Log.
Alternativ zur oben genannten manuellen Erstellung kann man das ganze auch über das Terminal lösen, einfach folgenden Befehl eingeben.
mkdir -p /home/user/ros2_ws/src && cd /home/user/ros2_ws && colcon build
Als nächstes dann das Simulationstutorial starten.